Pegasi Rover information page

SUMMARY:
This is a remote control (RC) toy which is essentially just an axle of only two complex wheels. Yes, it will freely roll sideways unless the user turns it along the path of rolling to counter against the careening; and that is the whole point !
The coils can spin to move it along its axis and the hubs themselves can rotate oposite to each other for turning. Having only two wheels, it is deliberately unstable and the challenge consists in the ability of the operator to navigate it. The vehicle also features some sensory automation such that pressing a stop button will engage in automatic stopping maneuvers. Also there is a fully auto mode where the user merely points to a direction and the vehicle uses its onboard computer, compass, and operator position to navigate itself.
 SIDEWAYS ROLLING
SIDEWAYS ROLLING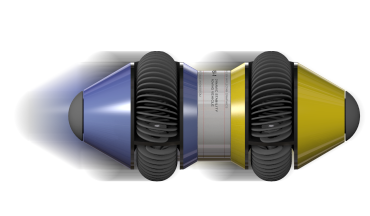 FORWARD THRUST
FORWARD THRUST TURNING MOTION
TURNING MOTIONFUN FACTOR:
As a hobby / toy / stunt vehicle, and with the stability system turned off, the Pegasi can be a serious challenge to navigate manually. It exhibits a tendency to careen due to inertia, while changing directions, and also a tendency to roll freely depending on ground surface inclination. It requires focus, coordination and reflexes from the operator. Competitions and challenges can be arranged (in skill testing tracks) to determine champions of mastery and skill.
CHALLENGE:
The user has control of two parameters
- Longitudinal thrust (thanks to the peripheral coil elements of the omnidirectional wheels)
- Steering (when the wheels rotate as a whole in opposite directions)
The challenge is to utilize the above two controls, synergistically and judiciously, in order to compensate for the vehicle's careening tendency (due to inertia or incidental terrain inclination) and attempt to keep the vehicle on course.
FEATURES:
- Built-in sensory and dynamic stability system.
- Stop button for automated deceleration maneuvers and dynamic position holding.
- Simple remote controlled operation with ergonomic controller having forward, reverse and steering.
- Vivid contrasting color between opposing ends of the vehicle corresponding to forward / rear thrust arrows on the controller.
- Two operation modes:
- Novice mode: Interprets steering signals as headings and uses its internal compass in attempt to maintain direction. For example if the user turns the steering knob to indicate “North” the vehicle will engage its dynamic stability system in attempt to maintain the heading and auto-compensate for ground morphology. This simplifies navigation of the vehicle and makes it easier for novices.
- Expert mode: Disengages the dynamic stability system and the steering is interpreted as merely degrees of rotation. For example if the user turns the steering knob 30 degrees, then the vehicle also turns itself 30 degrees. This makes navigation much more difficult because the user needs to compensate manually for all factors.
- Auto deceleration when radio signal is cutoff (or out of range) or when battery level is low.
- Interchangeable coil-treads.
- Balanced weight distribution of internal components, allows rover to roll smoothly (without wobbling)


